Modeling Trust in Human-Robot Interaction
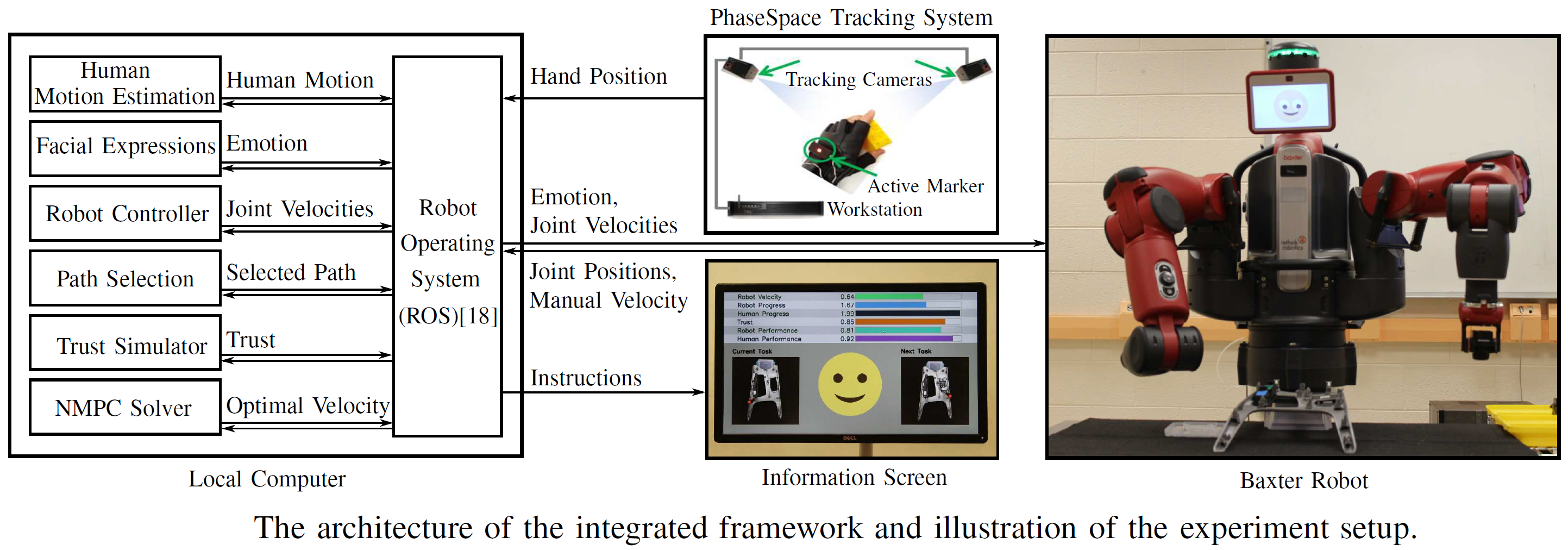
Human trust in robots is one of the key factors in Human-Robot Interaction and a prerequisite for effective Human-Robot Collaboration. Trust characterizes the reliance and tendency of human in using robots. Over-reliance or under-reliance might occur due to improper trust, which results in poor team collaboration, and hence higher task load and lower overall task performance. Inspired by well-known human factors research, I developed a time-series trust model for human-robot collaboration tasks, which is a function of prior trust, robot performance, and human performance. The robot performance is evaluated by its flexibility to keep pace with the human coworker and is molded as the difference between human and robot speed. The human performance in doing physical tasks is directly related to his/her muscle fatigue level. We use the muscle fatigue and recovery dynamics to capture the fatigue level of the human body when performing repetitive kinesthetic tasks, which are typical types of human motions in manufacturing. We experimentally validate our model and control schemes by conducting a series of human-in-the-loop experiments using Rethink Robotics Baxter robot [ref].